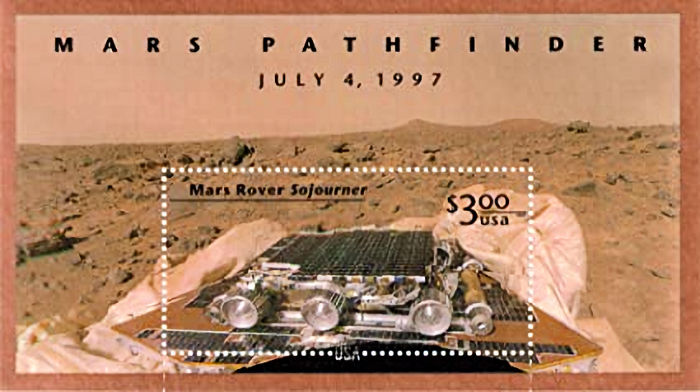
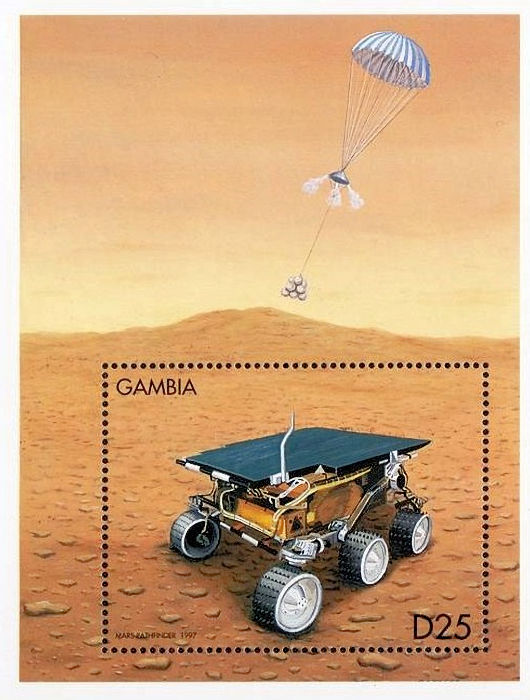
Mars Pathfinder est une sonde spatiale de type atterrisseur, développée par l’agence spatiale américaine, la NASA, qui s’est posée sur le sol de la planète Mars le 4 juillet 1997 à Ares Vallis, dans la région de Chryse Planitia. L’engin spatial principal est avant tout un démonstrateur technologique à bas coût qui permet de valider le recours à une nouvelle technique d’atterrissage en douceur sur Mars, utilisant des coussins gonflables, et utilise pour la première fois sur Mars un petit robot mobile (astromobile), Sojourner.
Mars Pathfinder est la première mission de la NASA sur le sol de Mars depuis le programme Viking, qui s’est déroulé en 1976, soit 20 ans plus tôt. À l’origine, le projet du centre de recherche Ames, baptisé MESUR, consiste à créer un réseau de 16 stations équipées de capteurs (sismomètre, station météorologique…) amenées sur le sol de Mars par des engins spatiaux très simples. L’envolée du coût de ce projet, les restrictions budgétaires et le refus par le nouvel administrateur de la NASA de développer des missions coûteuses aboutissent à un projet quasiment dépourvu de contenu scientifique qui est confié au Jet Propulsion Laboratory. Mars Pathfinder est la deuxième mission du programme Discovery de la NASA qui rassemble des projets d’exploration du Système solaire à faible coût.
La mission Mars Pathfinder remplit complètement les objectifs limités qui lui ont été fixés et s’achève le 27 septembre 1997. La charge utile, réduite à une station météorologique, une caméra et un spectromètre embarqué sur le rover Sojourner, apporte peu d’informations scientifiques nouvelles. Par contre, pour la première fois, le détail du déroulement d’une mission spatiale est communiqué en temps réel au grand public, image à l’appui, grâce à la généralisation d’Internet, médiatisation qui connaît un énorme succès. Les innovations techniques testées, le système d’atterrissage avec airbags et le recours à un rover seront réutilisés par les missions Mars Exploration Rover lancées en 2003.
 Au début des années 1990 la seule exploration approfondie et in situ de la surface de Mars a été effectuée par les sondes spatiales du programme Viking de la NASA qui se sont posées à la surface de la planète en 1976. Ces atterrisseurs fixes n’ont pu qu’effectuer des analyses limitées sur le site d’atterrissage. Au début des années 1990 les établissements de l’agence spatiale américaine réfléchissent à de nouvelles méthodes d’exploration de la surface de Mars. Le Centre de recherche Ames propose dans le cadre de son projet MESUR (Mars Environmental Survey) de créer un réseau de capteurs sur l’ensemble de la planète en lançant à chaque ouverture de la fenêtre de lancement vers Mars (tous les deux ans environ) quatre petits atterrisseurs fixes lancés par une unique fusée et chargés d’étudier chacun une région donnée. Pour réduire les coûts la technique utilisée par ces sondes pour descendre jusqu’au sol est simplifiée : pas de radar, des rétrofusées à la poussée fixe et un système d’airbag pour annuler la vitesse d’arrivée au sol. Chaque atterrisseur est identique et a une masse de 160 kg. Il est alimenté en énergie par un générateur thermoélectrique à
Au début des années 1990 la seule exploration approfondie et in situ de la surface de Mars a été effectuée par les sondes spatiales du programme Viking de la NASA qui se sont posées à la surface de la planète en 1976. Ces atterrisseurs fixes n’ont pu qu’effectuer des analyses limitées sur le site d’atterrissage. Au début des années 1990 les établissements de l’agence spatiale américaine réfléchissent à de nouvelles méthodes d’exploration de la surface de Mars. Le Centre de recherche Ames propose dans le cadre de son projet MESUR (Mars Environmental Survey) de créer un réseau de capteurs sur l’ensemble de la planète en lançant à chaque ouverture de la fenêtre de lancement vers Mars (tous les deux ans environ) quatre petits atterrisseurs fixes lancés par une unique fusée et chargés d’étudier chacun une région donnée. Pour réduire les coûts la technique utilisée par ces sondes pour descendre jusqu’au sol est simplifiée : pas de radar, des rétrofusées à la poussée fixe et un système d’airbag pour annuler la vitesse d’arrivée au sol. Chaque atterrisseur est identique et a une masse de 160 kg. Il est alimenté en énergie par un générateur thermoélectrique à
radioisotope doit prendre des photos du site et recueillir des données avec un sismomètre et une station météorologique. Seize sondes devaient être lancées dont les quatre premières en 1996. Leur longévité devait être d’au moins 8 ans pour que l’ensemble du réseau d’instruments puisse fonctionner au moins deux ans de manière simultanée. Un satellite de télécommunications en orbite autour de Mars est ajouté pour permettre le transfert des données vers la Terre. Le coût total sur une décennie s’élève à un milliard de US$. De son côté le centre de recherche Langley propose d’utiliser des pénétrateurs qui seraient largués par un véhicule de descente dérivée des sondes spatiales Viking.
Le centre Jet Propulsion Laboratory (JPL) avait étudié auparavant une mission de retour sur Terre d’échantillons du sol de Mars qui utilisait un rover. Les responsables du JPL lancent l’étude d’une version miniaturisée de ce rover. Un ingénieur du JPL, Don Bickler propose un système de suspension articulé reposant sur 6 roues simple qui permet de négocier efficacement les obstacles présents sur le sol de Mars. Un prototype avait été construit en 1989.
Le budget du projet MESUR augmente au fur et à mesure des études alors que la NASA est confrontée à des restrictions budgétaires. Les responsables de la NASA décident d’attribuer la première fenêtre de lancement de 1996 à un démonstrateur technologique baptisé SLIM (Surface Lander Investigation of Mars). Celui-ci est chargé de valider les choix techniques de MESUR et ainsi convaincre les responsables de la NASA de déployer le réseau de sondes spatiales. De son côté le Jet Propulsion Laboratory développe un prototype de son rover d’une masse de 7,1 kg et le propose en tant que charge utile de cette première mission. Le rover doit permettre le déploiement du sismomètre au sol. Celui-ci doit être au contact avec le sol pour que les signaux ne soient pas brouillés par des vibrations communiquées à la sonde spatiale par le vent, les variations de température, etc. À l’époque le recours à un bras robotisé pour ce déploiement n’est pas considéré comme une solution viable compte tenu de l’expérience acquise au cours des missions Viking (c’est pourtant cette solution qui sera retenue pour le déploiement du sismomètre InSight lancé en 2018). La NASA donne son accord au développement du projet et le transfère au JPL. Le démonstrateur SLIM est rebaptisé MESUR Pathfinder. Pour des raisons de coût, le sismomètre, raison d’être des stations MESUR, n’est finalement pas embarqué. Il est jugé moins prioritaire que le mini-rover. La durée de vie de l’atterrisseur est limitée à 30 jours (au lieu des 8 ans des stations MESUR) et des panneaux solaires remplacent le générateur thermoélectrique à radioisotope. Finalement le système d’atterrissage à l’aide d’airbags est la seule caractéristique conservée du projet MESUR. Ce dernier est annulé peu après pour des raisons budgétaires et parce que les projets de cette envergure ne rentrent plus dans la stratégie d’exploration du système solaire prônée par le nouvel administrateur de la NASA.
La mission correspondant au retour des Américains sur Mars depuis vingt ans, ses objectifs sont essentiellement techniques. Il s’agit en effet de tester des procédures qui pourront être utilisées ultérieurement sur des missions ambitieuses sur le plan scientifique et donc plus coûteuses.
prouver que la devise « faster, better and cheaper » (plus rapide, mieux et moins cher) peut s’appliquer aux missions spatiales (la sonde a été développée en seulement trois ans pour un coût inférieur à 150 millions de dollars, soit cinq fois moins que le projet Viking). Autrement dit, démontrer qu’il est possible de se rendre sur une autre planète en utilisant une technologie à la fois plus complexe et pour un coût raisonnable. En l’occurrence, le coût de la mission Pathfinder s’élève à 280 millions de dollars, en y incluant les coûts annexes (opérations au sol durant la mission et lancement de la sonde).
Les missions Viking avant d’atterrir sur Mars, avaient été placées sur orbite ce qui avait permis d’étudier et de sélectionner sur place le site d’atterrissage. Mars Pathfinder, après avoir atteint Mars, pénètre directement dans l’atmosphère martienne ce qui impose de sélectionner le site d’atterrissage à l’avance pour placer la sonde spatiale sur la bonne trajectoire. Les contraintes sont toutefois moins fortes que pour les missions Viking car le système d’airbag permet d’atterrir même sur un sol relativement irrégulier. Le recours à des panneaux solaires impose par contre une latitude à laquelle le Soleil se trouve au zénith à la date d’atterrissage. Enfin l’altitude du site doit être suffisamment basse pour donner le temps à la sonde spatiale de réduire suffisamment sa vitesse. Compte tenu de ces contraintes techniques une vingtaine de sites ont été étudiés par la communauté scientifique réunies dans le cadre d’un atelier qui a eu lieu en 1994. Le site d’atterrissage choisi, Ares Vallis, est une ancienne plaine alluviale, située dans l’hémisphère nord de Mars par 19,4° de latitude nord et 33,1° de longitude ouest. Il se trouve à environ 850 kilomètres au sud-est du site d’atterrissage de Viking 1. Le site a été choisi parce qu’on y trouve une grande variété de roches à portée du petit rover dont certaines proviennent sans doute de la région des hauts plateaux qui n’a jusque là jamais été visitée.
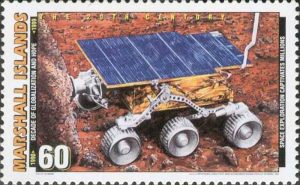
Le rover Sojourner (nommé d’après Sojourner Truth) pèse 10,6 kg et mesure 65 cm de long pour 48 cm de large et 30 cm de haut. Doté de six roues il peut s’éloigner théoriquement jusqu’à 500 mètres de la zone d’atterrissage. Le système de suspension de type rocker-bogie a été mis au point par le JPL et permet à ses roues de 13 centimètres de diamètre de franchir des obstacles de 20 centimètres et gravir des pentes de 45°. Chaque roue dispose dans son moyeu d’un moteur électrique et peut pivoter de manière indépendante. Sa vitesse de déplacement théorique est de 24 mètres par heure mais en pratique il ne dépassera jamais 1 cm/s durant les opérations au sol sur Mars. L’énergie est fournie par un panneau solaire d’une superficie de 0,25 m2. La consommation électrique de ses équipements et de ses instruments est de 16 watts. Durant la nuit il utilise une batterie au lithium non rechargeable. Pour maintenir les équipements à une température acceptable ceux-ci sont isolés sur le plan thermique par des blocs d’aérogel, une matière d’une densité infime mais possédant un très bon pouvoir isolant. Ce dispositif est complété par trois piles contenant chacune 2,6 grammes de plutonium 238 dont la désintégration fournit de la chaleur. Il est relié en bande UHF avec l’émetteur récepteur radio de l’atterrisseur. Pour ses déplacements Sojourner dispose de deux modes de fonctionnement. D’une part il peut recevoir des instructions de la Terre (par l’intermédiaire de l’atterrisseur). L’opérateur analyse les images du terrain environnant pour définir les instructions de déplacement. Il peut également naviguer de manière autonome en analysant la réflexion des rayons lumineux émis par cinq lasers dont il dispose à l’avant. Cette analyse lui permet de distinguer les obstacles et de les contourner. S’il ne parvient pas à trouver un passage, il signale par radio à la Terre qu’il est bloqué.
Durant son séjour à la surface de Mars, 17 050 images (dont 550 venant du rover) ont été réalisées et transmises et 8,5 millions de mesures de la pression atmosphérique, de la température et de la vitesse des vents martiens ont été effectuées. Le rover a parcouru une centaine de mètres et effectué 230 manœuvres, réalisant l’analyse chimique de seize roches et parcelles de sol différents, répartis sur une surface d’environ 250 m2. La mission, qui avait une durée prévue de sept jours, a duré 12 fois plus longtemps.
Source : Wikipédia.